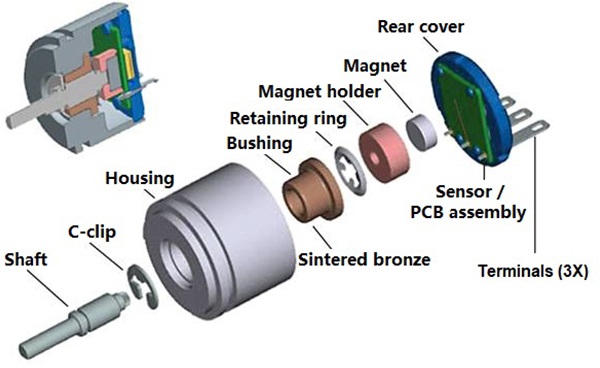
As jo de mooglikheid hawwe om in magnetyske rotearjende encoder te disassemble, sille jo normaal in ynterne struktuer sjen lykas de hjirboppe werjûn. De magnetyske encoder is gearstald út in meganyske skacht, in shellstruktuer, in PCB-assemblage oan 'e ein fan' e encoder, en in lytsdisc magneetdraaiend mei de skacht oan 'e ein fan' e meganyske skacht.
Hoe mjit de magnetyske encoder de feedback fan rotaasjeposysje?
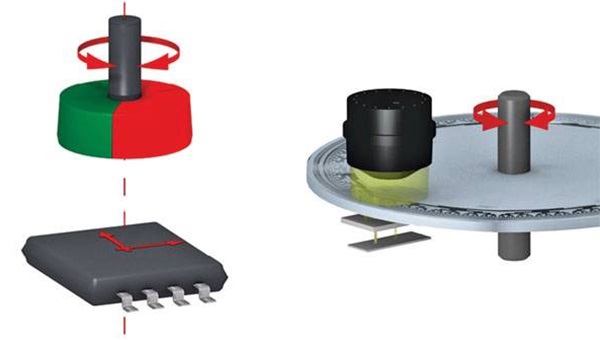
Hall-effekt: de produksje fan potinsjeel ferskil oer in dirigint dy't elektryske stroom draacht as in magnetysk fjild wurdt tapast yn 'e rjochting loodrecht op dy fan streamende stroom.
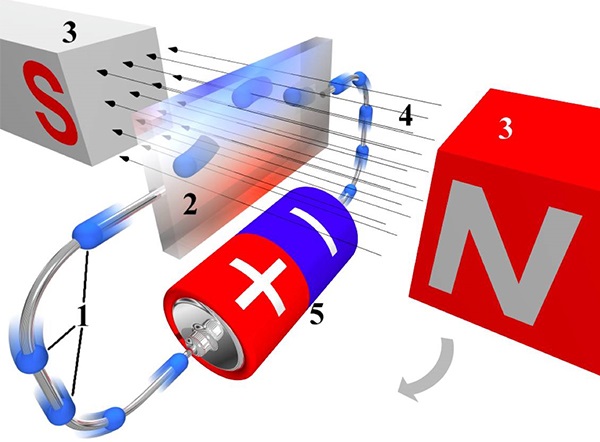
As it magnetyske fjild tapast op 'e dirigint wurdt rotearre yn' e rjochting werjûn troch de pylk hjirboppe mei it hjoeddeistige streampaad as de as, sil it Hall potinsjele ferskil feroarje fanwege de feroaring fan 'e hoeke tusken it magnetysk fjild en de dirigint, en de feroaring trend fan de potinsjele ferskil is in sinusoidal kromme. Dêrom, basearre op 'e spanning oan beide kanten fan' e bekrêftige dirigint, kin de rotaasjewinkel fan it magnetyske fjild omkeard wurde berekkene. Dit is it basiswurkmeganisme fan in magnetyske encoder by it mjitten fan feedback fan rotaasjeposysje.
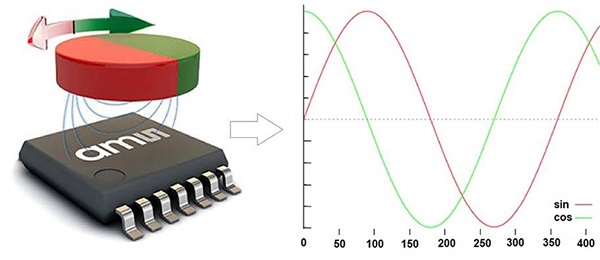
Fergelykber mei it prinsipe dat de resolver twa sets fan ûnderling perpendicular útfierspoelen brûkt, binne twa (of twa pearen) hallinduksje-eleminten mei ûnderling perpendicular hjoeddeistige rjochtingen ek nedich yn 'e magnetyske encoder om de unike korrespondinsje te garandearjen tusken de rotearjende posysje fan it magnetyske fjild en de útfier spanning (kombinaasje).
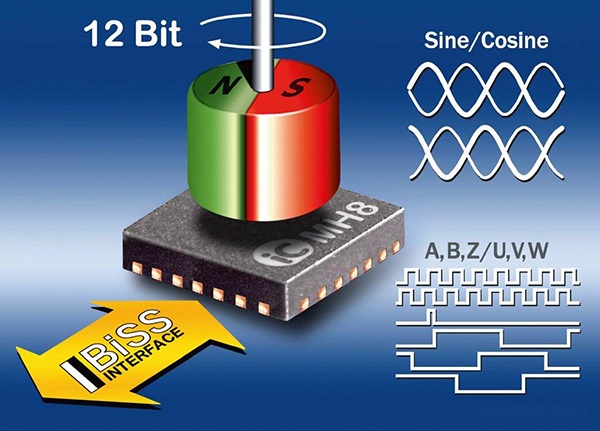
Tsjintwurdich hawwe Hall-sensoren (chips) dy't brûkt wurde yn magnetyske encoders oer it generaal in hege mjitte fan yntegraasje, dy't net allinich hall-halfgeleiderkomponinten en besibbe sinjaalferwurkings- en regelkringen yntegreart, mar ek ferskate soarten sinjaalútfiermodules yntegreart, lykas sinus en cosinus analoge sinjalen, fjouwerkante wave digitale nivo sinjalen of bus kommunikaasje útfier units.
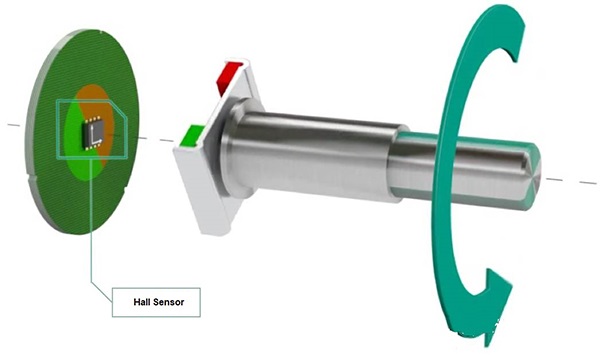
Op dizze manier, ynstallearje in permaninte magneet lykas sintered Neodymium magneet dy't generearret in magnetysk fjild oan 'e ein fan' e encoder rotearjende skacht, pleats de hall sensor chip neamd hjirboppe op in PCB circuit board, en benaderje de permaninte magneet oan 'e ein fan' e encoder skacht neffens bepaalde easken (rjochting en ôfstân).
Troch it analysearjen fan it spanningsinjaalútfier fan 'e hallsensor fia it PCB-circuit board, kin de rotearjende posysje fan' e encoderrotor wurde identifisearre.
De struktuer en wurkprinsipe fan 'e magnetyske kodearring beslút de spesjale eask oer dizze permaninte magneet, bygelyks magneetmateriaal, magneetfoarm, magnetisaasjerjochting, ensfh. Normaaldiametrically magnetized Neodymium magneetskiif is de bêste magneet opsje. Ningbo Horizon Magnetics wurde belibbe yn it leverjen fan in protte fabrikanten fan magnetyske encodes mei guon maten fandiametrale Neodymium skiif magneten, D6x2.5mm en D10x2.5mm diametric disc Neodymium magneten wêrfan binne de meast populêre modellen.
It kin sjoen wurde dat yn ferliking mei de tradisjonele optyske encoder de magnetyske encoder gjin komplekse koadeskiif en ljochtboarne nedich hat, it oantal komponinten is minder, en de deteksjestruktuer is ienfâldiger. Boppedat, Hall elemint sels hat ek in protte foardielen, lykas stevige struktuer, lytse grutte, licht gewicht, lange libbensdoer, trilling ferset, net bang fan stof, oalje, wetterdamp en sâlt mist fersmoarging of corrosie wachtsje.
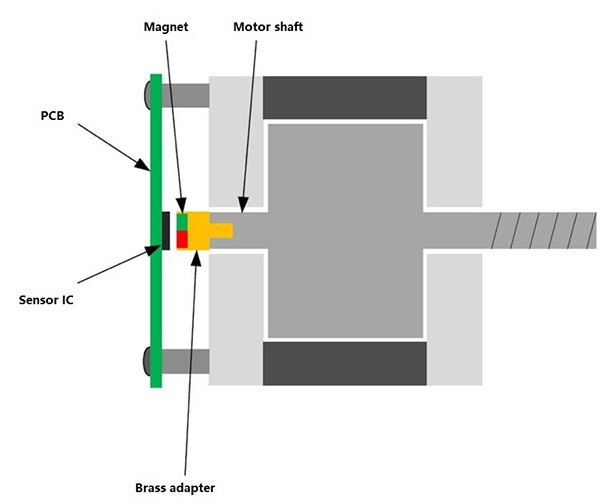
Wannear't de magnetyske encoder technology wurdt tapast op de rotaasje posysje feedback fan de elektryske motor, desintere NdFeB magneet silinderfan de magnetyske encoder kin direkt ynstallearre wurde oan 'e ein fan' e motor skacht. Op dizze manier kin it it oergongskoppellager (as keppeling) elimineare dy't nedich is by it brûken fan de tradisjonele feedback-encoder, en berikke kontaktleaze posysjemjitting, wat it risiko fan encoder-falen (of sels skea) ferminderet troch de trilling fan 'e meganyske as tidens de wurking fan de elektryske motor. Dêrom helpt it om de stabiliteit fan elektryske motor operaasje te ferbetterjen.
Post tiid: Jul-21-2022